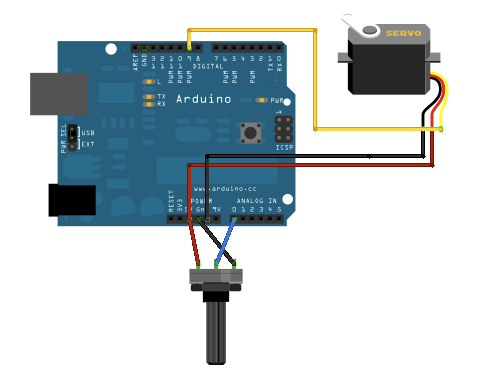
Los servomotores tienen tres cables: energía, la tierra, y señal. El cable de alimentación es típicamente rojo, y debe ser conectado al pin 5V de la placa Arduino. El cable a tierra es normalmente negro o marrón y debe estar conectado a un terminal de tierra de la placa Arduino. El pasador de señal es normalmente de color amarillo o naranja y se debe conectar al pin 9 de la placa Arduino.
El potenciómetro se debe cablear de manera que las dos patillas exteriores están conectados al poder (5 V) y la tierra, y su pin central está conectada a la entrada 0 del Arduino analógico.
Codigo:
// Controlling a servo position using a potentiometer (variable resistor)
// by Michal Rinott <http://people.interaction-ivrea.it/m.rinott>
#include <Servo.h>
Servo myservo; // create servo object to control a servo
int potpin = 0; // analog pin used to connect the potentiometer
int val; // variable to read the value from the analog pin
void setup()
{
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop()
{
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
val = map(val, 0, 1023, 0, 179); // scale it to use it with the servo (value between 0 and 180)
myservo.write(val); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
}
Para mas información dar click en link:
Arduino - Knob